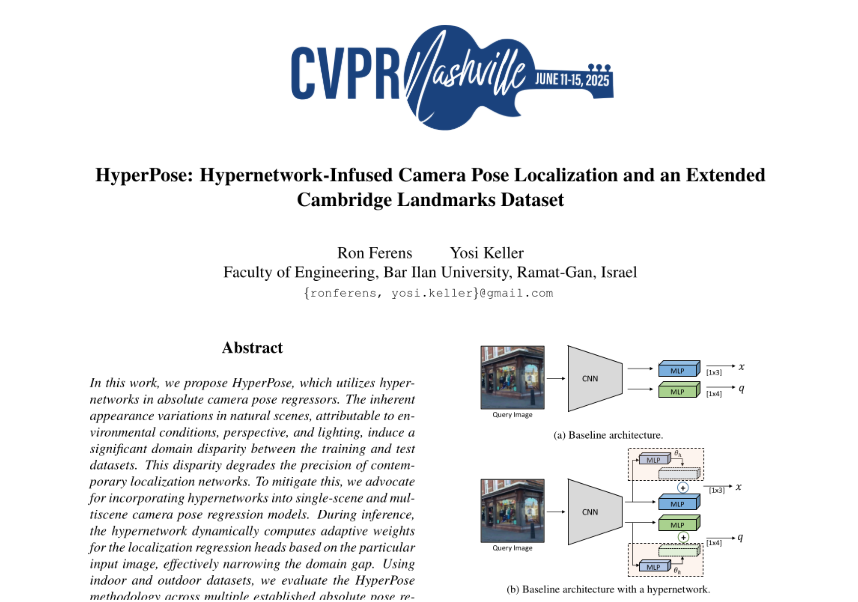
HyperPose: Hypernetwork-Infused Camera Pose Localization and an Extended Cambridge Landmarks Dataset
CVPR, 2025
Accepted to The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2025
We advocate for incorporating hypernetworks into single-scene and multiscene camera pose regression models.